|
 |
| а) | б) |
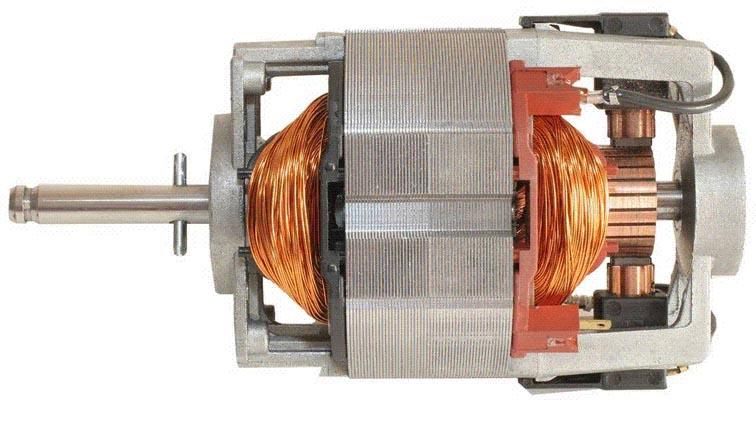
типовая конструкция коллекторного двигателя (б).
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель – электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра – это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
К двигателям постоянного тока относятся два типа – это привычные для нас коллекторные двигатели и бесколлекторные (шаговые) двигатели. В первых переменное магнитное поле, обеспечивающее вращение вала двигателя, образуется обмотками ротора, которые запитываются через щеточный коммутатор – коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор. Статор может быть изготовлен как из системы постоянных магнитов, так и из электромагнитов. Во втором типе электродвигателей обмотки образуют неподвижную часть двигателя (статор), а ротор сделан из постоянных магнитов. Здесь переменное магнитное поле образуется путем коммутации обмоток статора, которая выполняется внешней управляющей схемой. Шаговые двигатели («stepper motor» в английском написании) значительно дороже коллекторных. Это достаточно сложные устройства со своими специфическими особенностями. Их полное описание требует отдельной публикации и выходит за рамки данной статьи. Для получения более полной информации по двигателям этого типа и их схемам управления можно обратиться, например, к [1].
Коллекторные двигатели (рис.1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три – это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
|
|||||
| Рисунок 1. Коллекторный двигатель с редуктором (а) и типовая конструкция коллекторного двигателя (б). |
|||||
Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, LM317 [2]. Возможные варианты такой схемы представлены на рис.2.
|
|||||
| Рисунок 2. Схемы управления маломощным коллекторным двигателем на базе ИМС LM317. | |||||
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На рис.2 он обозначен как RLIM. Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на рис.2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на рис.2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором – минимальную. Что выбрать – зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12V; максимальный рабочий ток 1А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5А до 1.5А (см. спецификацию [2]; имеются аналогичные ИМС и с бoльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением VIN и выходным VOUT, равной 3V, будет рассеиваться мощность не менее
P = (VIN – VOUT) × I = 3 × 1 = 3 Вт.
Таким образом, нужен радиатор. Опять вопрос – на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5V (см. рис.3), и она составит почти 5 Вт!
 |
|
| Рисунок 3. График зависимости мощности, рассеиваемой на ИМС регулятора, от выходного напряжения. |
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
Выход из положения – использовать для управления метод широтно-импульсной модуляции (ШИМ). Он, действительно, самый распространенный. Его суть – подача на двигатель промодулированных по длительности однополярных прямоугольных импульсов. Согласно теории сигналов, в структуре такой последовательности имеется постоянная составляющая, пропорциональная отношению τ/T, где:τ – длительность импульса, а T – период последовательности. Вот она-то и управляет скоростью двигателя, который выделяет ее как интегратор в этой системе. Поскольку выходной каскад регулятора на основе ШИМ работает в ключевом режиме он, как правило, не нуждается в больших радиаторах для отвода тепла, даже при относительно больших мощностях двигателя, и КПД такого регулятора несравненно выше предыдущего. В ряде случаев можно использовать понижающие или повышающие DC/DC-преобразователи, но они имеют ряд ограничений, например, по глубине регулировки выходного напряжения и минимальной нагрузке. Поэтому, как правило, чаще встречаются иные решения. «Классическое» схемное решение такого регулятора представлено на рис.4 [3]. Оно использовано в качестве дросселя (регулятора) в профессиональной модели железной дороги.
 |
|
| Рисунок 4. «Классическая» схема управления коллекторным двигателем на основе ШИМ (согласно оригиналу [3]). |
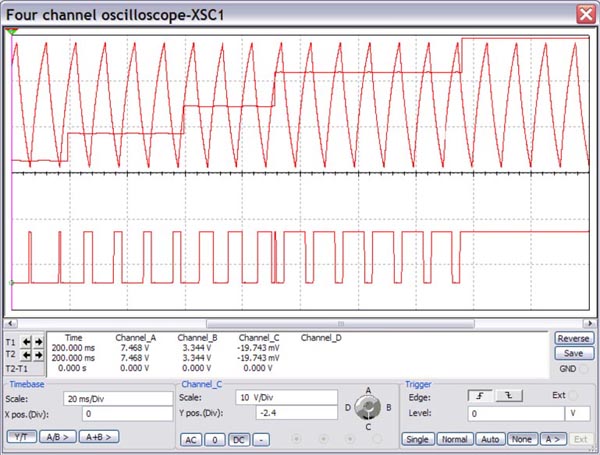
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (рис.5).
 |
|
| Рисунок 5. Диаграмма управления коллекторным двигателем на основе ШИМ. Верхняя трасса – напряжение на конденсаторе С1; средняя (пересекает верхнюю) – сигнал управления (напряжение на движке резистора RV2); нижняя – напряжение на двигателе. |
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа BUZ11 [4]. Особенности этого транзистора типа MOSFET – большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (рис.4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Еще одна проблема таких регуляторов – это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на рис.4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Еще одно замечание к схеме на рис.4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ±20V, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12V, невозможны.
Если использовать биполярный транзистор, то возникает проблема формирования достаточного по величине базового тока. Как известно, для насыщения ключа на биполярном транзисторе ток его базы должен быть, по крайней мере, не менее 0.06 от тока нагрузки. Понятно, что операционный усилитель такой ток может не обеспечить. С этой целью в аналогичном, по сути, регуляторе, который используется, например, в популярном мини-гравере PT-5201 компании Pro'sKit, применен транзистор TIP125, представляющий собой схему Дарлингтона. Тут интересный момент. Эти мини-граверы иногда выходят из строя, но не из-за перегрева транзистора, как можно было бы предположить, а из-за перегрева ИМС LM358 (максимальная рабочая температура +70°C) выходным транзистором (максимально допустимая температура +150°C). В изделиях, которыми пользовался автор статьи, он был вплотную прижат к корпусу ИМС и посажен на клей, что недопустимо нагревало ИМС и почти блокировало теплоотвод. Если вам попалась такое исполнение, то лучше «отклеить» транзистор от ИМС и максимально отогнуть. За это know-how автор статьи был премирован компанией Pro'sKit набором инструментов. Как видите все нужно решать в комплексе – смотреть не только на схемотехнику, но и внимательно относиться к конструкции регулятора в целом.
|
|||||
| Рисунок 6. Пример схем регуляторов с ШИМ и изменением опорной частоты. | |||||
Есть еще несколько интересных схем более простых ШИМ-регуляторов. Например, две схемы на одиночном операционном усилителе с драйвером опубликованы в [5] (Одна из них приведена на рис.6а). Есть схемы и на базе популярного таймера серии 555 [6] (рис.6б). Эти дешевые решения не должны вводить вас в заблуждение своей кажущейся простотой. Вспомним А.С.Пушкина: «Не гонялся бы ты, поп, за дешевизной». Или французов: «За каждое удовольствие нужно платить». Обе эти схемы формируют суррогатный сигнал ШИМ с изменением опорной частоты. Так схемы на ОУ из [5] меняют частоту управления во время регулирования от 170 Гц до 500 Гц, а схема на таймере – от 150 Гц до 1000 Гц, и ее диапазон регулировки (верхний диапазон) ограничен скважностью 9.5. Для некоторых применений это может быть недопустимо, так как на больших частотах двигатель может и не заработать, или не дать нужный момент вращения. Это происходит из-за того, что ток в обмотке двигателя, которая представляет собой индуктивность, устанавливается не мгновенно, а нарастает и спадает по экспоненте. Более корректные схемы на базе таймера и одиночного ОУ приведены на рис.7.
|
|||||
| Рисунок 7. Схемы регуляторов с ШИМ без изменения опорной частоты. | |||||
Аналогичные по структуре регуляторы можно построить и на цифровых логических элементах, но они имеют малую нагрузочную способность и требуют отдельного источника питания, поэтому в данной статье не рассматриваются. Применение же таймера 555 интересно тем, что частота генератора, выполненного на его базе, практически не зависит от напряжения питания. Кроме того, большинство ныне выпускаемых зарубежных аналогов, выполненных по биполярной технологии, допускает выходной ток до 200 мА и более. То есть, они могут легко справиться и с емкостью затвора MOSFET и с мощными ключами на биполярных транзисторах. Близкий к таймеру 555 советско-российский аналог – это ИМС (КР)1006ВИ1. Максимальный выходной ток для КР1006ВИ1 и КМОП-версий таймера составляет 100 мА.
Выше были рассмотрены, скажем так, типовые схемы, прототипы которых можно легко найти в Интернете. Но иногда перед разработчиками устройств с коллекторными двигателями могут стоять совершено иные, и куда более сложные задачи. Например, необходимо осуществить управление прецизионной переменной нагрузкой, не допускающей рывков и чувствительной к остановке и пуску двигателя. Особенно остро эта проблема стоит при использовании малоинерционных двигателей, то есть миниатюрных двигателей с малой собственной массой ротора. Простая подача некоторого фиксированного напряжения на такой двигатель приводит к его мгновенному старту и рывку. Один из вариантов решения такой проблемы, использованный автором статьи в серийном, разработанном им изделии, представлен на рис.8.
 |
|
| Рисунок 8. Схема управления для маломощных двигателей, работающих на нагрузку с переменным моментом. |
Схема представляет собой регулятор напряжения с ограничением по току, то есть имеет падающую выходную характеристику – зависимость выходного напряжения от тока, потребляемого двигателем. Выходное напряжение регулятора при номинальной нагрузке двигателя задается делителем R6, R8, и для варианта, приведенного на рис.8, может быть установлено в пределах от 10.8V до 2.3V. Первичная характеристика управления ограничением по току задается номиналом сопротивления R3 и устанавливается подстроечным резистором R4 (с учетом резистора R5). Максимальный выходной ток может быть с приемлемой точностью рассчитан по формуле
![]()
где 6.6 – это максимальное напряжение на эмиттере транзистора VT1 регулятора в режиме короткого замыкания в нагрузке. В приведенной схеме, в отличие от остальных схем регуляторов, напряжение в режиме короткого замыкания мало зависит от установленного выходного напряжения. Здесь реальный максимальный выходной ток равен примерно 3.3А, а минимальный ток ограничения равен приблизительно 40 мА. Как можно видеть, диапазон регулировки тока достаточно широк, что не под силу многим другим схемам регуляторов, в которых нет внутреннего усилителя, дополняющего токовый сенсор. Ток ограничения в среднем положении ротора подстроечного резистора R4 лежит на уровне 340 мА во всем диапазоне выходных напряжений при изменении питающего регулятор напряжения от 9V до 15V. Максимальный ток достигается в левом положении движка (по рис.8), минимальный – в правом. Как уже упоминалось, выходное напряжение, а, следовательно, и скорость вращения двигателя при минимальной нагрузке ротора, устанавливается подстроечным резистором R8 («Скорость вращения»), а подстройка необходимого уровня ограничения по току осуществляется подстроечным резистором R4 («Ток»). Схема с точностью не хуже 2% удерживает выходное напряжение на заданном уровне до достижения 65% нагрузки (максимального выходного тока, установленного резистором R4). Далее напряжение на двигателе начинает плавно уменьшаться, тем самым, ограничивая развиваемый им момент.
При включении схемы (из-за ограничения тока и, следовательно, момента) рывка в управлении внешней нагрузкой не происходит. После разгона двигатель переходит в стационарный режим с током потребления ниже установленного схемой ограничения. При увеличении нагрузки двигателя более установленного уровня выходной ток регулятора ограничивается на заданном уровне, а напряжение на двигателе уменьшается, и при закорачивании ротора, то есть при полной остановке, становится равным падению напряжения на активном сопротивлении обмотки ротора при заданном максимальном выходном токе. График, показывающий изменение мощности двигателя в зависимости от тока нагрузки, приведен на рис.9.
 |
|
| Рисунок 9. Графики зависимости мощности и напряжения на двигателе от нагрузки при токе ограничения 200 мА. |
Как видно из графика, мощность, в случае если нагрузка на двигатель превышает 70%, начинает ограничиваться и плавно уменьшаться. При принудительной остановке двигателя она составит всего 12% от максимально установленной, тем самым, защищая двигатель от перегрузки. Ток ограничения регулятора рекомендуется выбирать на 20-25% выше номинального рабочего тока в заданном режиме эксплуатации при минимально допустимом рабочем напряжении двигателя. При проектировании необходимо учитывать мощность, рассеиваемую на регулирующем транзисторе VT1. (Возможно, потребуется радиатор). У читателя может возникнуть законный вопрос. Зачем так сложно, когда можно просто? То есть использовать вариант, представленный на рис.3 с ограничением тока. Чтобы развеять сомнения и снять вопросы, на рис.10 показан график зависимостей для схем, приведенных на рис.2 в аналогичных условиях. Заметна разница? При этом учтите, что напряжение холостого хода будет не 5V, а 6.4V, и схема уже не будет стабилизатором напряжения. Токоограничивающий резистор будет иметь сопротивление на уровне 6 Ом, и об оперативной подстройке тока можно будет забыть.
 |
|
| Рисунок 10. Графики зависимости мощности и напряжения на двигателе от нагрузки при токе ограничения 200 мА для варианта схемы на рис.2. |
Кроме особенностей схемы, описанных выше, данное решение не только предохраняет нагрузку, но и продлевает срок службы самого двигателя. А в отличие от вариантов с использованием ШИМ, такое решение практически не оказывает дополнительного влияния на общий уровень электромагнитных и радиопомех устройства в целом.
А что делать в случае, когда необходимо иметь управление относительно мощным коллекторным двигателем, который управляет массивной инерционной нагрузкой, требующей достаточно точного позиционирования при ее остановке и, главное, реверса. Заметьте, все предыдущие и широко распространенные схемы ни остановку с фиксацией ротора, ни реверс не обеспечивают. В лучшем случае реверс осуществляется при помощи механического переключателя [3]. Удобное и, главное, гибкое решение для решения данной задачи, выполненное на драйвере шагового двигателя мостового типа, представлено на рис.11.
 |
|
| Рисунок 11. Схема управления с реверсом для мощных двигателей, работающих на инерционную нагрузку. |
Для выбора направления вращения двигателя служит тумблер S1, а индикация наличия питания и направление вращения указываются двуцветным светодиодным индикатором HL1. Собственно включение двигателя осуществляется кнопкой ON. Основой схемы является микросхема драйвера LMD18245T обычно используемого для шаговых двигателей [7]. Подробно особенности данной ИМС и пример ее использования по назначению приведены в [1].
Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 (резистор R4 на рис.11), и двоичным кодом на контактах цепи управления выходным током (выводы 8, 7, 6, 4). Для облегчения выбора установок в спецификации [7] имеется формула и таблица. Ограничение тока осуществляется таким образом, что для большинства применений нет надобности в охлаждающем радиаторе. При включении ключи выбранных плеч моста полностью открыты, а при достижении максимальной (заданной по входам «М») величины тока осуществляется его «нарезка» (так называемый чоппинг – «chopping»). Эта «нарезка» не является неким подобием ШИМ, и осуществляется с заданной пользователем частотой. Частота «нарезки» задается параллельной RC цепочкой, подключенной к выводу 3 драйвера (элементы R5, C6). Выходной каскад LMD18245T содержит все необходимые защитные элементы – быстродействующие диоды, установленные параллельно выходным ключам. Реверс выполняется подачей логической единицы переключателем «Направление вращения». Кроме того, эта ИМС позволяет легко осуществлять и режим принудительного торможения двигателя в момент остановки. Это достигается замыканием обмотки ротора двигателя. Остановка с торможением реализуется подачей логической единицы на вывод 10 (вход BRAKE), вследствие чего обмотка двигателя закорачивается внутренними ключами драйвера. Представленное на рис.11 решение не документировано в спецификации [7], но оно весьма удобное, и за все время его использования отказов или сбоев не наблюдалось.
 |
|
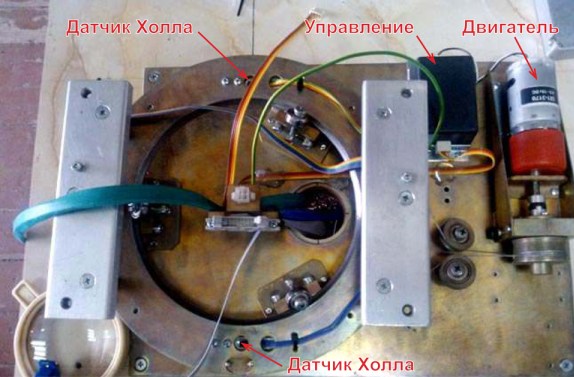
| Рисунок 12. Приводной поворотный узел. |
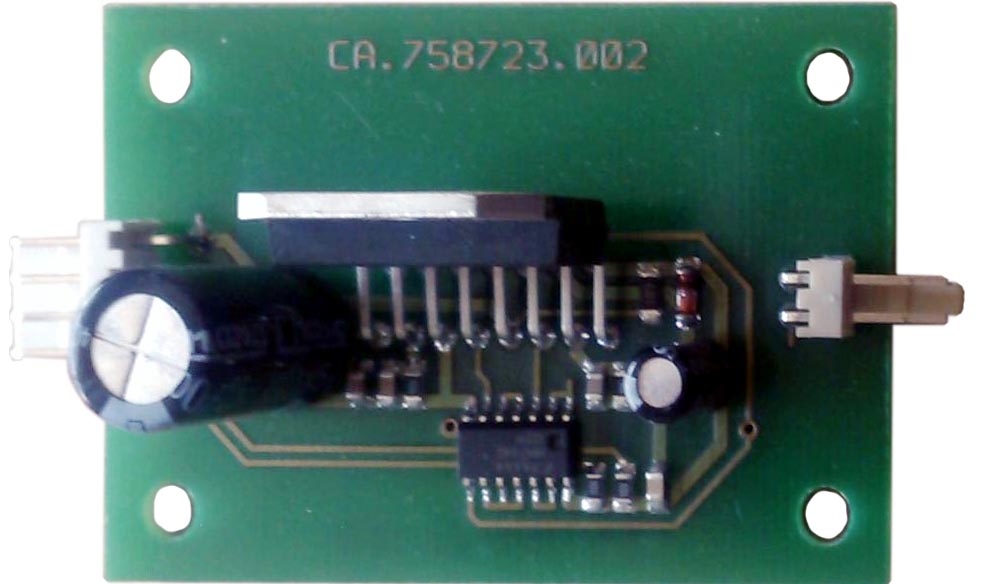
Для питания изображенной на рис.11 схемы можно использовать любой источник напряжения постоянного тока, рассчитанный на ток не менее 2А, с выходным напряжением 12V. (Внешний контакт цилиндрического разъема должен быть минусом, внутренний – плюсом). Кажущимся недостатком схемы является относительная дороговизна ИМС LMD18245T. Но если сравнивать это решение с «традиционными», то проигрыш в стоимости окажется несущественным, а в ряде случаев (простота управления, реверс, точная остановка с торможением ротора, отсутствие радиаторов, компактность и пр.) его просто не будет. Такое решение используется автором статьи в составе серийного изделия для управления движением платформы массой в 50 кг; приводной поворотный узел в сборе показан на рис.12. Плата привода двигателя представлена на рис.13.
 |
|
| Рисунок 13. Плата привода. |
За рамками предлагаемой статьи остались вопросы, связанные с проблемой задания и поддержания некоторой определенной скорости вращения. Как отмечалось при рассмотрении регуляторов, скорость вращения двигателя в таких системах зависит от напряжения питания двигателя и его нагрузки. В отношении регуляторов на базе ШИМ существует заблуждение, что они более точны. Это далеко не так, поскольку их скорость зависит не только от скважности, но так же, как у аналоговых регуляторов, и от напряжения питания. В ряде случаев это может оказаться важным или определяющим фактором. Так недостаточная нагрузочная способность источника питания может не только изменить функцию регулирования (она станет нелинейной), но также ограничить момент и максимальную скорость вращения. Чтобы избежать такой ситуации, лучше не использовать питание непосредственно от выпрямителя, как это выполнено в [3] (см. рис.4), а дополнить устройство эффективным стабилизатором.
Если стоит проблема не просто регулирования, а стабилизации скорости, то она решается при помощи сложных систем с контуром обратной связи (не по току!). Одним из элементов такой обратной связи являются датчики, дающие информацию о скорости вращения (таходатчики). Информация снимается или с вала ротора двигателя, или с конечного исполнительного механизма. Скорость стабилизируется либо путем использования фазовой автоматической подстройки частоты (ФАПЧ) вращения, либо традиционными для автоматики специальными регуляторами. Обычно используются пропорционально-интегрально-дифференциальные (ПИД) регуляторы, как более универсальные, или пропорционально-интегральные (ПИ), как более простые. В любом случае, оба эти решения достаточно сложны как для расчета, так и для исполнения, так как они привязаны не только к конкретному типу двигателя, но и ко всей системе привода в целом. Причем характеристики регулирования в таких системах определяются экспериментально. Ознакомиться с такими регуляторами можно во втором томе «настольной книги» каждого уважающего себя инженера [8]. Но все изложенное касается построения петли управления. А вот конечные каскады в таких системах аналогичны описанным выше. Используются либо аналоговые регуляторы, либо регуляторы с ШИМ.
В заключение необходимо напомнить, что все без исключения коллекторные двигатели являются источниками электромагнитных и радиопомех. В Интернете мало схем, в которых этому вопросу уделяется внимание. Поэтому при использовании коллекторных двигателей необходимо принимать специальные меры по выполнению требований по электромагнитной совместимости. При этом нужно иметь ввиду, что ШИМ-регуляторы проигрывают аналоговым. Для обеспечения должной электромагнитной совместимости необходимо выполнять ряд мер. А именно, правильно выбирать двигатели, не поддаваться искушению использовать дешевые поделки с медными, а не графитовыми щетками коллекторов. Советские коллекторные двигатели серий ДП(М) были и остаются в этом отношении далеко не худшими. Необходимо осуществлять правильную разводку печатной платы, использовать развязку земель и помехоподавляющие элементы, такие как низкоимпедансные электролитические конденсаторы (так называемые Low ESR), керамические конденсаторы и специальные помехоподавляющие фильтры, которые должны выбираться с учетом их работы без насыщения на выбранных максимальных токах. Обязательно шунтировать двигатели керамическими конденсаторами, размещая их непосредственно на выводах (лучше ламелях) двигателей.
Литература: